PPS-23-ScalaSim
Design di Dettaglio
Il design architetturale dell’intero sistema puo essere suddiviso in 3 macro componenti, i quali a loro volta sono suddivisi e descritti in componenti piu semplici che incapsulano un unico argomento. Le tre macro categorie di concetti che compongono il sistema sono:
- Cellular Automaton
- Environment
- Engine
L’intero sistema si basa su questi tre capisaldi, i quali compongono principalmente le componenti di model e controller all’interno del pattern MVC: in particlare, Cellular Automaton ed Environment fanno parte della componente model, mentre Engine costituisce il controller dell’intero applicativo. Questo rende possibile la realizzazione di molteplici componenti view che, considerando i requisiti del sistema, può permettere la realizzazione di un interfaccia grafica e di un esportatore video che siano unicamente dipendenti dall’implementazione del controller.
Nelle sezioni successive verrano elencate le diverse strategie utilizzate per sviluppare le diverse componenti, andando ad elencare le scelte effettuate nella realizzazione delle diverse funzionalita per far sii che sia altamente personalizzabile, in modo da facilitare la creazione di simulazioni.
Cellular Automaton
Il Cellular Automaton, puo essere visto come un contenitore di regole che fanno riferimento ai diversi stati che compongono il Cellular Automaton stesso. Per ogni Cell che viene memorizzata all’interno dell’Environment verrà scelta una regola specifica, in modo da calcolare correttamente lo stato sucessivo o gli stati successivi, a seconda del Cellular Automaton che si sta modellando fino a quel momento (WaTor coinvolge sempre la modifca dello stato di due celle contemporaneamente).
Il design che riguarda il Cellular Automaton ha richiesto una serie di scelte importanti, affinche fosse possibile riuscire ad incapsulare la sua astrazione in una serie di diversi componenti.
Cell
Lo spazio di un ambiente è composto da un numero finito di celle. Ogni cella,
oltre ad avere assegnate un insieme di coordinate, ha il compito di mantenere
uno stato in un determinato istante di tempo. Lo Stato di una cella è
un’astrazione che dipende in base all’automa cellulare, ed esso può essere un
semplice stato “nominale” (e.g. Dead, Alive, …) oppure può mantenere un
valore associato a quello stato (e.g. Shark(chronon = 1, energy = 100),
Fish(chronon = 1), …). Per entrambi i casi, lo stato determina
l’unità fondamentale su cui si basano le regole e i comportamenti dell’automa.
Tramite quest’astrazione è possibile costruire una griglia di celle le quali possono contenere un’informazione generica utile per la specifica del comportamento dell’automa, mantenendo allo stesso tempo una posizione ben definita all’interno dello spazio dell’ambiente stesso.
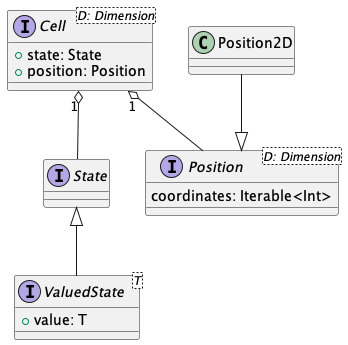
Nel diagramma è mostrata la struttura base delle componenti fondamentali di una cella: una cella dipende dallo spazio dell’ambiente in cui risiede, riuscendo così a definire una posizione all’interno di tale spazio. Successivamente, ad una cella è assegnato uno e un solo stato.
Neighbour
Gran parte dei comportamenti degli automi cellulari è caratterizzato dal concetto di vicinato di una cella. In letteratura esistono vari generi di vicinato, in particolare si ricordano il vicinato di Moore e il vicinato di Von Neumann. Esistono però numerosi automi dove vengono impiegate strategie differenti per l’individuazione dei vicini di una cella (e.g. Rule110). È quindi fondamentale rendere il sistema capace di rappresentare sia vicinati standard come i due sopracitati, ma allo stesso tempo permettere in modo semplice la definizione di vicinati custom.
In generale, il concetto di Neighbour presenta due componenti principali:
- centro: rappresenta la cella per il quale viene calcolato il vicinato;
- vicinato: rappresenta la collezione di celle che compone il vicinato della cella centrale; questa collezione non fa riferimento ad una specifica regola con la quale individuare i vicini, dal momento in cui diversi automi cellulari potrebbero utilizzare regole diverse per individuare il proprio vicinato.
Durante il corso di questo documento e all’interno del progetto, si fa spesso riferimento a concetti di posizione relativa e assoluta: con i due termini si indicano due modalità differenti per esprimere le posizioni dei vicini componenti un vicinato rispetto al centro. Nel caso in cui si parli di posizione relativa, si intende che le posizioni assunte dai vicini saranno relative al centro del vicinato, dove quest’ultimo si assume abbia coordinate pari all’origine. In questo caso, per esempio, la posizione appena al di sopra del centro in uno spazio bidimensionale assumerà coordinate relative pari a (-1, 0), in quanto si troverà una riga precedente al centro ma sulla stessa colonna. D’altra parte, quando si parla di posizioni assolute, queste fanno riferimento alle coordinate assolute di tutte le celle del vicinato rispetto l’ambiente della simulazione. Risulta quindi possibile con questa astrazione definire una certa configurazione di un vicinato tramite posizioni relative, e quindi individuare il vicinato stesso di una certa cella tramite il valore delle coordinate di quest’ultima (i.e. il centro del vicinato) e i valori delle posizioni relative.
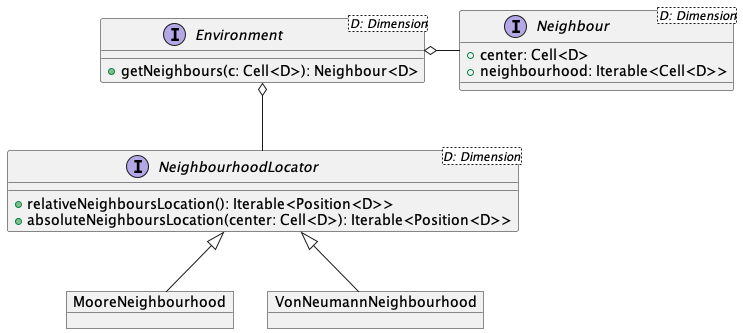
Nel diagramma UML soprastante è mostrato come già descritto il concetto di
Neighbour. L’ambiente calcola un vicinato a partire da una cella che ne
costituirà il centro. Per il calcolo del vicinato, l’ambiente si avvale di un
NeighbourhoodLocator, il quale definisce i pattern e le configurazioni che un
determinato vicinato deve assumere, definendolo in termini di posizioni
relative. Infine, quest’ultimo espone un ulteriore metodo per il passaggio da
posizioni relative a posizioni assolute in riferimento all’ambiente.
Rule
Il comportamento di un automa cellulare è definito attraverso un insieme di regole, le quali prendendo in input una o più celle dell’ambiente, calcolano un nuovo stato della cella per l’iterazione successiva. Data la natura variabile delle regole di un automa cellulare, deve essere possibile generalizzare al meglio il concetto di regola applicabile ad un determinato stato. Per le considerazioni effettuate nella sezione precedente inoltre, la maggior parte delle regole di un automa sono basate su un insieme di stati dei vicini di una cella. Per questo motivo si è arrivati alla modellazione mostrata nel diagramma UML sottostante.
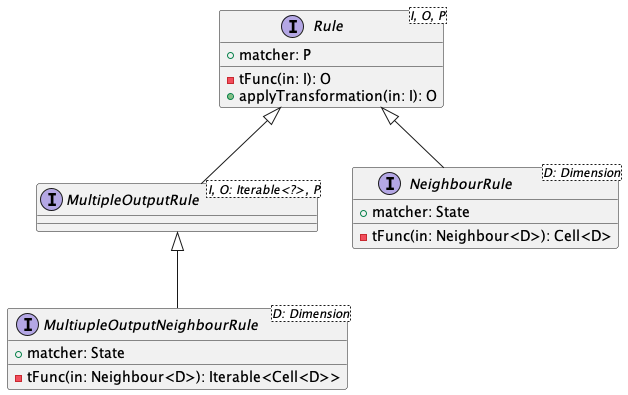
Nel diagramma UML, Rule rappresenta il concetto più generico di regola, la
quale non è altro che la definizione di una funzione di trasformazione. Ogni
regola è associata ad un matcher, il quale rappresenta il parametro che
permette di decidere se applicare la funzione o meno. Una ragionevole
specializzazione di una regola generica è rappresentata da NeighbourRule, la
quale è riassumibile da una funzione che prende in input un vicinato, e se il
centro ha lo stesso stato specificato dal parametro matcher e il vicinato
soddisfa la regola, allora restituisce in output la nuova cella rappresentante
il nuovo centro del vicinato. MultipleOutputRule rappresenta una regola
generica il cui output è composto da una collezione di output, mentre
MultipleOutputNeighbourRule ha lo stesso obiettivo di NeighbourRule con la
differenze che il risultato dell’applicazione della regola è composto da un
insieme di celle. Questo può risultare utile per tutte quelle regole che
prevedono la modifica simultanea di più celle in base allo stato di un centro,
oppure per modellare il concetto di movimento di una certa entità all’interno
dello spazio (e.g. l’automa cellulare WaTor).
Dopo aver mostrato come sono composte le componenti fondamentali è possibile capire di cosa si compone un automa cellulare e quali siano gli scopi e i compiti delle sue componenti.
Ogni automa cellulare ha un comportamento più o meno complesso: risulta perciò fondamentale astrarre in una struttura generale ogni possibile automa, e via via raffinare il suo comportamento mediante specializzazioni sempre più specifiche per un singolo automa.

Come mostrato nel diagramma UML, esiste un concetto genrale di automa, da cui ereditano tutte le specializzazioni. Possiamo distinguere due macro categorie che risultano importanti per questo elaborato:
CellularAutomaton→ un semplice automa cellulare, capace di mantenere e applicareNeighbourRule. Questo componente a sua volta può essere raffinato in due ulteriori realizzazioni:MapSingleRulesdove la collezione delle regole è rappresentata da una mappa da stato a regola, risultando quindi in un automa dove, per ogni stato esiste una ed una sola regola.MapMultipleRulesdove, essendo associato per ogni stato un insieme di regole, è impiegato per tutti quei casi dove per ogni stato sono associate più regole che possono produrre un output valido.
MultiOutputCellularAutomaton→ in questo caso, associato per ogni stato esiste unaMultipleOutputNeighbourRule, la quale, come già illustrato, produce un insieme di celle in output una volta applicata ad un vicinato.
Environment
Il secondo macro concetto che è costituito dalla componente Environment.
L’Environment fa sempre riferimento ad un singolo automa cellulare, ed è
responsabile del mantenimento dello stato attuale della griglia (l’insieme di
celle). Questo significa che l’ambiente deve poter essere in grado di
effettuare tre importanti operazioni:
- Manipolazione della griglia;
- Calcolo di un vicinato;
- Applicazione e salvataggio delle regole dell’automa cellulare sulle celle della griglia.
In considerazione di ciò, possiamo separare ma legare tra loro i concetti di spazio e di ambiente inteso come manipolatore e applicatore delle regole sulle celle componenti la griglia.
Di seguito il diagramma UML delle classi che compongono ambiente e spazio.

Di seguito una breve descrizione per le principali componenti:
Space→ rappresentazione dello spazio all’interno del quale risiedono le celle durante la simulazione. Lo spazio si compone di una griglia (Matrix), la cui struttura viene raffinata dalle implementazioni di questa componente, tra cui si ricordanoSquareEnvironmenteRectangularEnvironment.GenericEnvironmentil quale si compone di uno spazio ed un automa cellulare, e definisce meccanismi con cui modificare la griglia applicando le regole dell’automa. Sue vere e proprie specializzazioni sono rappresentate daComplexeSimpleenvironment, ovvero spazi che accettano rispettivamenteMultiOutputCellularAutomatoneCellularAutomatonsemplici.ArrayEnvironment2D→ specializzazione di un ambiente che definisce la struttura dati effettiva della griglia (Matrix). Questa sarà la componente più utilizzata dagli automi sviluppati per questo elaborato, in quanto rende semplice la manipolazione della griglia in un ambiente bidimensionale. Di interessante rilievo è una sua ulteriore sotto-specializzazione per la rappresentazione di ambienti Toroidali.
L’uso di questa grande mole di specializzazioni verrà illustrato in dettaglio nel capitolo riguardante l’implementazione.
Engine
L’ultimo componente appartenente al cuore del sistema software è il motore del
simulatore. Suo compito è quello di mantenere, interrogare e richiedere la
modifica di un Environment. Come precedentemente illustrato, esistendo una
grande quantità di tipologie di ambiente, l’implementazione del motore dovrebbe
essere agnostica rispetto l’istanza di ambiente assegnatagli.
Un ulteriore compito del motore è quello di scandire le iterazioni della simulazione stessa, siano esse potenzialmente infinite e interrompibili da un utente, oppure ben definite al momento della creazione del motore.
Infine, essendo il motore ciò che rende possibile l’evolversi di un automa cellulare nel tempo, costituisce uno dei principali fattori di attenzione alle prestazioni, e la sua implementazione dovrebbe tenere in considerazione il requisito non funzionale di prestazioni sufficientemente elevate per le simulazioni richieste.
Dal momento in cui possono esserci diverse modalità con la quale voler eseguire
la simulazione (e.g. visualizzazione real time con GUI, simulazione con
output finale un video, …) è necessario creare concetti generali di un Engine,
che via via vengono raffinati in implementazioni capaci di adattarsi al meglio
per la specifica modalità d’esecuzione.
In base al design desiderato e ai requisiti elencati, si è arrivati al seguente modello.

In base alla tipologia di Environment, esistono le corrispettive
specializzazioni del motore (Complex e Simple); Quanto dichiarato nei
paragrafi precedenti ha portato lo sviluppo di ulteriori specilizzazioni del
motore più generale, in particolare:
GUIEngine2D→ motore in grado di permettere l’aggancio di un’interfaccia grafica in tempo reale.TimerEngine2D→ motore con un numero di step finiti (utile per la generazione di video/immagini ).ThreadEngine2D→ versione ad alte prestazioni e thread-safe del motore.
Come per l’environment, nel capitolo successivo verrà illustrata l’intersecarsi di queste istanze per la costruzione di un engine che meglio si adatti alle esigenze della modalità di simulazione.
Interfaccia Grafica
La parte di interfaccia grafica del sistema fornisce agli utenti un modo intuitivo per interagire con le simulazioni. Questa interfaccia consente la configurazione specifica di ogni simulazione e l’avvio di essa e la successiva visualizzazione in tempo reale dei risultati. La progettazione si basa sull’uso della State Monad per gestire lo stato della finestra.
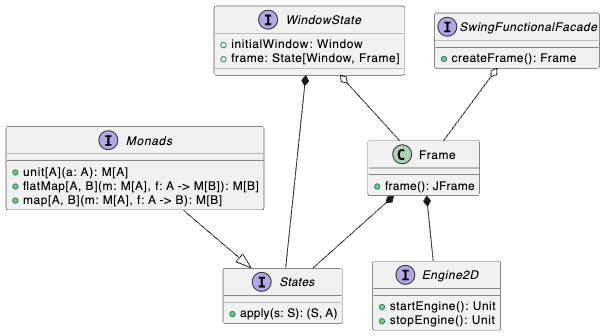
SwingFunctionalFacade
Punto di accesso principale per la creazione e gestione della GUI. Permette la creazione di Frame, la visualizzazione di elementi grafici, e gestione degli eventi.
Frame
Rappresenta una finestra principale dell’applicazione. Gestisce la disposizione dei componenti e la loro interazione.
Include metodi per l’aggiunta dei vari componenti grafici.
WindowState
Gestisce lo stato della finestra e le sue transizioni. Definisce una serie di operazioni che possono essere eseguite sulla finestra. Ogni operazione è modellata come una State Monad, che trasforma lo stato della finestra.
Uso delle Monadi
State Monad La State Monad viene utilizzata per gestire lo stato della finestra e facilitare la composizione delle operazioni che lo modificano. Questo approccio permette di mantenere l’immutabilità dello stato e di garantire operazioni sicure e prevedibili sulla GUI.
Video Exporter
Il modulo di esportazione è progettato per convertire lo stato di una matrice di celle in immagini e generare un video basato su queste immagini, il video exporter a parti. Questo processo è essenziale per visualizzare e analizzare le simulazioni degli automi cellulari.

Il processo di esportazione inizia con l’ottenimento dello storico (history) degli stati della matrice dall’ Engine tramite una sequenza di Cell che rappresentano gli stati dell’automa cellulare in diversi momenti del tempo.
Una volta ottenuto lo storico, l’Exporter si occuperà di convertire queste matrici in immagini. Durante questo processo, ogni cella viene disegnata sull’immagine in base alla sua posizione e al suo stato, utilizzando una mappa di colori.
Dopo che tutte le matrici sono state convertite ogni immagine viene aggiunta al video per un numero specifico di fotogrammi, in modo da creare un’animazione fluida che rappresenta l’evoluzione dell’automa cellulare nel tempo.
| Indice | Capitolo Precedente | Capitolo Successivo |